Hi-Cloud ผู้นำเทคโนโลยีการสแกนด้วยเลเซอร์ 3 มิติ
 |
| สถานที่กำเนิด: | จีน |
| ชื่อแบรนด์: | Hi-Cloud |
| ได้รับการรับรอง: | ISO, others upon the requests |
| หมายเลขรุ่น: | 3D LiDAR ไฮสแลม |
| จำนวนสั่งซื้อขั้นต่ำ: | 1 |
|---|---|
| ราคา: | negotiable |
| รายละเอียดการบรรจุ: | กรณีขนส่ง |
| เวลาการส่งมอบ: | 20 วันทำการ |
| เงื่อนไขการชำระเงิน: | ที/ที |
| สามารถในการผลิต: | 20 ชุด/เดือน |
| แอปพลิเคชัน: | การวัดส่วนหน้าอาคาร | พิสัย: | 120m@20% |
|---|---|---|---|
| ความถี่ของจุดสแกน: | 300,000แต้ม/วินาที | ความแม่นยำของระบบ: | ≤10cm |
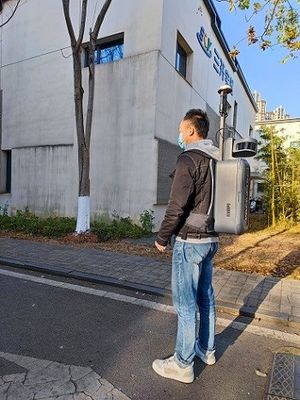
| โหมดการทำงาน: | มือถือ/เป้ | น้ำหนัก: | <2.5กก. |
| เน้น: | กระเป๋าเป้สะพายหลัง 3D LiDAR HiSLAM,3D LiDAR HiSLAM มือถือ,HiSLAM ระยะ 120 ม. |
||
มือถือหรือเป้ 3D LiDAR HiSLAM ระยะ 120 ม. ในการวัดส่วนหน้าอาคาร
การวัดส่วนหน้าอาคารไม่ได้เป็นเพียงโครงการหลักในการอัพเกรดอาคารเก่าและการสร้างแบบจำลอง 3 มิติในการก่อสร้างเมืองดิจิทัล แต่ยังเป็นความต้องการเร่งด่วนในการปกป้องอาคารโบราณและการได้มาซึ่งผลลัพธ์ส่วนหน้าของอาคารใหม่ (โครงสร้าง)ในปัจจุบัน ความยากของการวัดส่วนหน้าอาคารส่วนใหญ่สะท้อนให้เห็นในสองประเด็นต่อไปนี้ ประการแรก การวัดส่วนหน้าอาคารต้องมีการปรับแต่งรายละเอียดในระดับสูงจุดคุณลักษณะรูปร่างของอาคารมีมากมาย การเก็บข้อมูลทำได้ยาก และประสิทธิภาพในการวัดต่ำประการที่สอง งานวัดส่วนหน้าอาคารมีขนาดใหญ่และรอบเวลาสั้นวิธีการตัดขวางของกล้องสำรวจแบบดั้งเดิม การวัดแบบไม่มีปริซึมของสถานีทั้งหมด เรนจ์ไฟน การวัดไม้บรรทัดเหล็ก และวิธีการวัดอาคารอื่นๆ มีข้อบกพร่องร้ายแรงในด้านประสิทธิภาพการทำงานที่ไม่เพียงพอ
ด้วยการพัฒนาเทคโนโลยีเครื่องสแกนเลเซอร์ 3 มิติและการเกิดขึ้นของเครื่องสแกนเลเซอร์ 3 มิติแบบใช้มือถือที่ใช้เทคโนโลยี SLAM จึงนำเสนอโซลูชันใหม่สำหรับการวัดส่วนหน้าอาคาร ด้วยคุณสมบัติของการสแกนแบบกะทัดรัด แบบพกพา และแบบเคลื่อนที่ จึงสามารถปรับปรุงประสิทธิภาพการสแกนได้อย่างมีประสิทธิภาพ
กระบวนการของการวัดส่วนหน้าอาคารตาม HiSLAM ประกอบด้วยสามขั้นตอนหลัก: การสำรวจภาคสนาม การรวบรวมข้อมูลภาคสนาม และการประมวลผลข้อมูลภายในข้อมูลบนคลาวด์แบบจุดเลเซอร์ 3 มิติที่มีความแม่นยำสูงของอาคารสามารถรับได้ผ่านการดำเนินการเก็บข้อมูลภาคสนามของ HiSLAM จากนั้นการดำเนินการทำแผนที่ในงานด้วยตนเองสามารถรับข้อมูลด้านหน้าอาคารได้อย่างรวดเร็วและมีประสิทธิภาพ
ข้อมูลจำเพาะ
| รายการ | พารามิเตอร์ |
| ความแม่นยำของระบบ | ≤10cm (ความถูกต้องแน่นอนกลางแจ้ง) |
| ≤10ซม. (ความถูกต้องสัมพัทธ์ในร่ม) | |
| ช่วงการวัด | 120m@20% |
| ความถี่ของจุดสแกน |
300,000แต้ม/วินาที |
| กล้องพาโนรามา | ≥12MP |
| การจัดเก็บข้อมูล | 512GB SSD |
| การส่งข้อมูล | GigE/USB3.0 |
| อายุการใช้งานแบตเตอรี่ | ≥4ชั่วโมง |
| อุณหภูมิในการทำงาน |
-10-50 ℃, ความชื้น < 85% |
| น้ำหนัก | <2.5KG (โฮสต์มือถือ) |
| โหมดการทำงาน | มือถือ/เป้ |
ข้อดี
1. บูรณาการ: บูรณาการสูง บูรณาการในร่มและกลางแจ้ง
2. ไม่มีการสอบเทียบ: การสอบเทียบไม่ขึ้นกับผู้ให้บริการ
3. ความแม่นยำสูง: ความหนาแน่นของเมฆสูง, อัตราการจดจำจุดสูง, ความแม่นยำในการวัดสูง
4. ความน่าเชื่อถือสูง: การผลิตระดับสูง ระบบที่เสถียรและเชื่อถือได้
5. ความฉลาดสูง: การรวมจุดคลาวด์แบบพาโนรามาอย่างราบรื่น
สร้างผลการวัดส่วนหน้าด้วยเครื่องสแกนเลเซอร์ 3 มิติแบบใช้มือถือที่ใช้เทคโนโลยี SLAM
![]()
ผู้ติดต่อ: Mr. EPiC Team
โทร: +8618520517897